 機床商務網(wǎng)
機床商務網(wǎng)





詳細介紹
西門子專業(yè)訂貨號CP5611A26GK1561-1AA01 西門子專業(yè)訂貨號CP5611A26GK1561-1AA01
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產(chǎn)品,*,質(zhì)量保證,價格優(yōu)勢
西門子PLC,西門子觸摸屏,西門子數(shù)控系統(tǒng),西門子軟啟動,西門子以太網(wǎng)
西門子電機,西門子變頻器,西門子直流調(diào)速器,西門子電線電纜
我公司大量現(xiàn)貨供應,價格優(yōu)勢,*,德國*
在電網(wǎng)-變頻器-電機-負載構成的驅(qū)動系統(tǒng)中,能量的傳遞是雙向的。電動機工作模式時,電能從電網(wǎng)經(jīng)由變頻器傳遞到電機,轉換為機械能帶動負載,負載因此具有動能或勢能;當負載釋放這些能量以求改變運動狀態(tài)時,電機被負載所帶動,進入發(fā)電機工作模式,向前級反饋已轉換為電形式的能量,這些能量被稱為再生制動能量,可以通過變頻器返回電網(wǎng),或者消耗在變頻器系統(tǒng)的制動電阻中。如圖1-1所示。
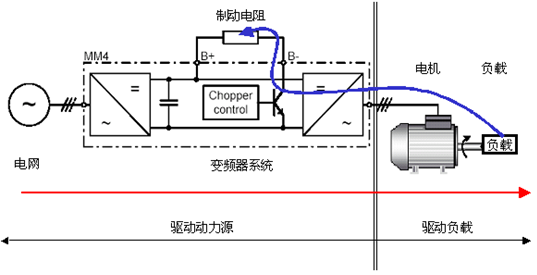
圖1-1 驅(qū)動系統(tǒng)的能量流向
較大制動能量的產(chǎn)生經(jīng)常出現(xiàn)在下面幾種場合里:
? 起重設備的重物下放過程西門子CP5611A2通訊卡
? 大慣量負載設備的快速減速過程
? 游梁式抽油機的驢頭下放過程等等。
西門子變頻器MM440由三部分構成,整流部分,直流回路部分,逆變部分。當MM440作為驅(qū)動轉換源而處在上述的制動過程時,制動能量將通過其逆變部分返回到直流回路,由于整流部分由不可控的二極管組成,制動能量無法回到電網(wǎng),造成直流回路電壓泵升,進而導致MM440因直流回路電壓過高(F0002)而停機。為避免上述情形的發(fā)生,MM440 提供了動態(tài)制動功能,即在直流回路上安裝一個制動單元,再配以適當?shù)闹苿与娮瑁瑢⒅苿幽芰吭谠撾娮枭弦詿崮艿男问较ⅰ-F尺寸的MM440已將制動單元集成在變頻器內(nèi)部,只需選配制動電阻,安裝在MM440端子B+ B- 上,然后調(diào)整相應的參數(shù)即可,而功率相對較大的FX、GX尺寸MM440內(nèi)部沒有集成制動單元,需要從SIMOVERT MASTERDRIVES的產(chǎn)品目錄里選配相應的制動單元以及制動電阻。
本章將介紹制動能量的簡單計算以及MM440制動單元的基本工作原理,幫助您實現(xiàn)西門子MM440變頻器制動電阻的正確選型。
二 制動能量的簡單計算
? 制動能量的產(chǎn)生
根據(jù)電機理論, 定子中通入同步頻率 ?1的交流電流, 在氣隙中產(chǎn)生順時針旋轉磁場作用在轉子上,相當于轉子繞組逆時針運動切割旋轉磁場,轉子回路因而感應出電生旋轉力矩M,方向如圖2-1中a所示。經(jīng)過負載的平衡,轉子以 (1-s) ?1的速度穩(wěn)定旋轉,轉子繞組仍然逆時針以s?1的速度切割旋轉磁場。電機工作在電動機模式下, P = M?Ω>0, 即運行在*象限。
在需要變頻器快速制動負載的情況下,變頻器通入電機定子中的電流頻率突降為?1′ (?1′ <?1), 由于驅(qū)動負載存在慣性,轉子的轉速不能突降,而是仍然維持在原轉速上,導致轉子繞組切割旋轉磁場的方向改變,轉子電流方向以及電磁力矩方向也因此發(fā)生改變,如圖2-1中b所示,電機工作在發(fā)電機模式下, 開始運行在第二象限,P=(-M)?Ω<0, 再生制動能量產(chǎn)生。 如果電機被負載拖動,轉子轉速超過變頻器輸入的同步轉速,同樣會有上述的現(xiàn)象發(fā)生。

a) 正向運行時 b) 轉子轉速大于同步轉速時
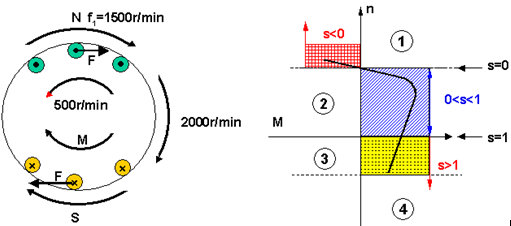
c) 轉子旋轉方向改變時 d) 電機四象限圖
圖2-1 制動能量產(chǎn)生時的電機狀態(tài)
在驅(qū)動系統(tǒng)下放重物的過程中,轉子繞組仍然保持逆時針運動切割旋轉磁場,轉子電流以及旋轉力矩方向不變,但是由于切割速度過快,轉磁磁場將能量返回了定子側,電機工作在發(fā)電機模式下, 開始運行在第四象限,如圖2-1中 c 所示,P=M?(-Ω)<0, 再生制動能量產(chǎn)生。
? 制動能量的簡單計算
例1 某客戶將MM440 應用在升降驅(qū)動設備上,并要求在6.25秒內(nèi)以0.4m/s的速度下 放500kg的重物,每30s重復一次該過程,應當如何計算制動功率?
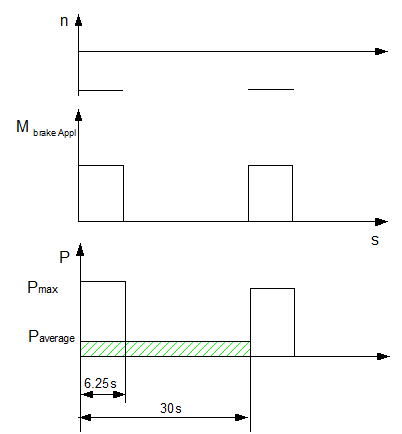
重物的勢能為: A= m x g x h =500kg x 9.81 x (0.4m/s x 6.25s)=12263J
大 功率為: P brake Appl max = A/s = 12263J/6.25s = 1962W
平均 功率為: P brake Appl average = 1962W x 6.25s / 30s= 392.4W
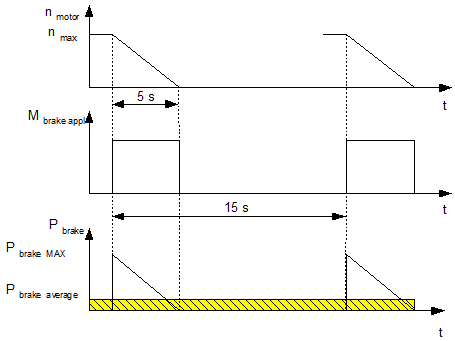
例2 某驅(qū)動負載需要從2900RPM的速度降至為0,其驅(qū)動數(shù)據(jù)見表1,如何計算反饋回變頻器直流側的制動能量?
電動機額定功率 Pmotor N=5.5 KW
電動機效率 ?motor =0.865
電動機額定轉速 N motor N= 2925 RPM
電動機轉動慣量 J motor =0.015kgm2
負載轉動慣量 J load =0.4 kgm2
電動機高運行轉速 nmax =2900RPM
制動時間 t brake appl =5s
負載工作周期 t cycle appl =15s
產(chǎn)生的制動轉矩:西門子CP5611A2通訊卡
一個周期內(nèi)產(chǎn)生的大制動功率:

一個周期內(nèi)的總制動能量:


一個周期內(nèi)的平均制動功率:

三 MM440 制動單元的基本工作原理
? 制動單元激活電壓與直流回路故障電壓
按照上述的計算方法得出的再生制動能量將反饋到變頻器的內(nèi)部,造成直流回路上電壓泵升。為了避免變頻器因直流回路過電壓F0002而跳閘,當電壓上升到臨界點 UDC chopper 時,制動單元就被激活,并按照預先規(guī)定的負載工作周期將制動能量消耗在外接制動電阻上,拉動直流回路電壓下降。如果制動能量過大,未能在規(guī)定時間內(nèi)得到散逸,那么直流回路電壓將繼續(xù)上升,直到F0002跳閘。如圖3-1所示。
圖3-1直流回路電壓的上升過程
| 制動單元觸發(fā)臨界電壓 UDC chopper有兩種算法,采用哪一種,則取決于MM440 參數(shù)P1254 | 若P1254=0 | 1.13 x  x P0210 x P0210 |
| 若P1254=1 | 0.98 x r1242 |
表3-1 激活動態(tài)制動功能的直流回路電壓值
? 制動單元動作過程
MM440變頻器制動單元的核心是一個門限電壓控制斬波器(IGBT transistor),當它導通時再生制動能量被外接制動電阻吸收,轉化成熱能得以釋放。斬波器的工作頻率 f chopper為2KHz,占控比 t chopper on 由變頻器內(nèi)部的監(jiān)控系統(tǒng)決定。如圖3-2所示。
圖3-2 動態(tài)制動的操作方式
當再生制動能量迫使直流回路電壓達到UDC chopper時,制動單元自動投入運行,由監(jiān)控系統(tǒng)為斬波器選擇適當?shù)恼伎乇龋苿幽芰勘恢苿与娮栉铡?/p>
? 如果制動能量少于在制動電阻上消耗的能量( P brake resistor=VDC2 / Rmin) ,那么直流回路電壓會很快下降到UDC chopper之下,制動單元會在開通2ms之后自動關閉,占控比的選擇在通路1上完成。 若直流回路電壓再次達到UDC chopper,該過程將被重復。
? 如果制動能量多于此時在制動電阻上消耗的能量,那么盡管制動自動已經(jīng)投入運行,直流回路電壓仍然會繼續(xù)上升,由監(jiān)控系統(tǒng)選擇的占控比也快速線性增加,直到占控比為1(通道1),斬波器持續(xù)開通,制動電阻在此其間持續(xù)吸收制動能量。為了保護此時的制動電阻不會因吸收了過多能量而過熱損壞,必須事先根據(jù)制動電阻的制動能力選擇適當?shù)某掷m(xù)工作時限 t chopper on。當持續(xù)工作時限達到時,切換到通道2,占控比自動被修正為P1237中設定的值以減少制動能量進入制動電阻,令其有充分的時間冷卻,此時直流回路電壓將有所回升。其過程如圖3-3所示。可見,如果電阻值選擇的太小,或者P1237 的值選擇不當,會造成制動能量因吸收不凈而導致的直流回路電壓繼續(xù)上升,而制動電阻會因過熱而損壞。
MM440制動單元的斬波器為通道2規(guī)定了5種占控比,即負載工作周期,由參數(shù)P1237 來選擇 。列表3-2如下。
| P1237 | t chopper on (斬波器占控比為1的長時間) | P brake resistor average | |
| 0 | 0% | 動態(tài)制動未激活 | 0 |
| 1 | 5% | 12.0s | 0.05 P brake Appl max |
| 2 | 10% | 12.6s | 0.1 P brake Appl max |
| 3 | 20% | 14.2s | 0.2 P brake Appl max |
| 4 | 50% | 22.8s | 0.5 P brake Appl max |
| 5 | * | 在制動單元激活狀態(tài)下始終開通 | 1 P brake Appl max |
表3-2 MM440的負載工作周期
四 制動電阻的計算以及選型
? 西門子制動電阻的說明
西門子MICROMASTER 變頻器產(chǎn)品樣本DA51.2 中列出的制動電阻只是按照P1237=1即5%的工作負載周期來進行設計的。例如: 訂貨號為6SE6400-4BC05-0AA0的制動電阻,小阻值為180?,可以承受大直流回路電壓為420V ,因此該制動電阻可在12秒內(nèi)連續(xù)開通,吸收 P brake resistor max = U dc max 2 /R min =980W的大制動功率。12秒后,僅能承擔5%的大制動功率,即約50W 的連續(xù)導通功率,直到240秒后制動電阻得到充分的冷卻,方可再次承擔12秒的大制動功率。
? 制動電阻的選擇與校驗
 機床商務網(wǎng)
機床商務網(wǎng)